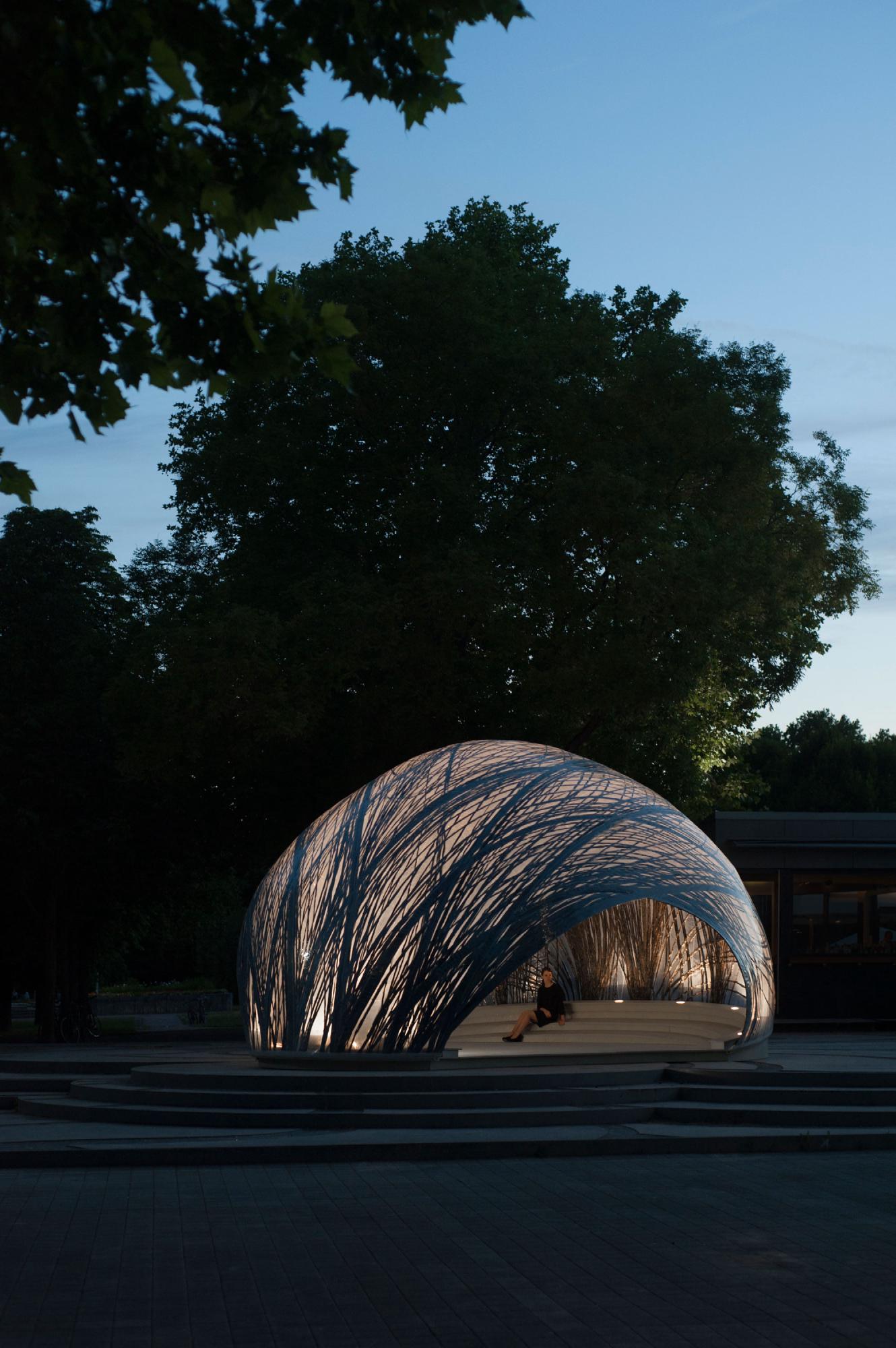
ICD/ITKE Research Pavilion 2014-15
The ICD/ITKE Research Pavilion 2014-15 demonstrates the architectural potential of a novel building method inspired by the underwater nest construction of the water spider. Through a novel robotic fabrication process an initially flexible pneumatic formwork is gradually stiffened by reinforcing it with carbon fibers from the inside.

The design concept is based on the study of biological construction processes for fiber-reinforced structures. These processes are relevant for applications in architecture, as they do not require complex formwork and are capable of adapting to the varying demands of the individual constructions. The biological processes form customized fiber-reinforced structures in a highly material-effective and functionally integrated way. In this respect the web building process of the diving bell water spider, (Agyroneda Aquatica) proved to be of particular interest. Thus the web construction process of water spiders was examined and the underlying behavioral patterns and design rules were analyzed, abstracted and transferred into a technological fabrication process.

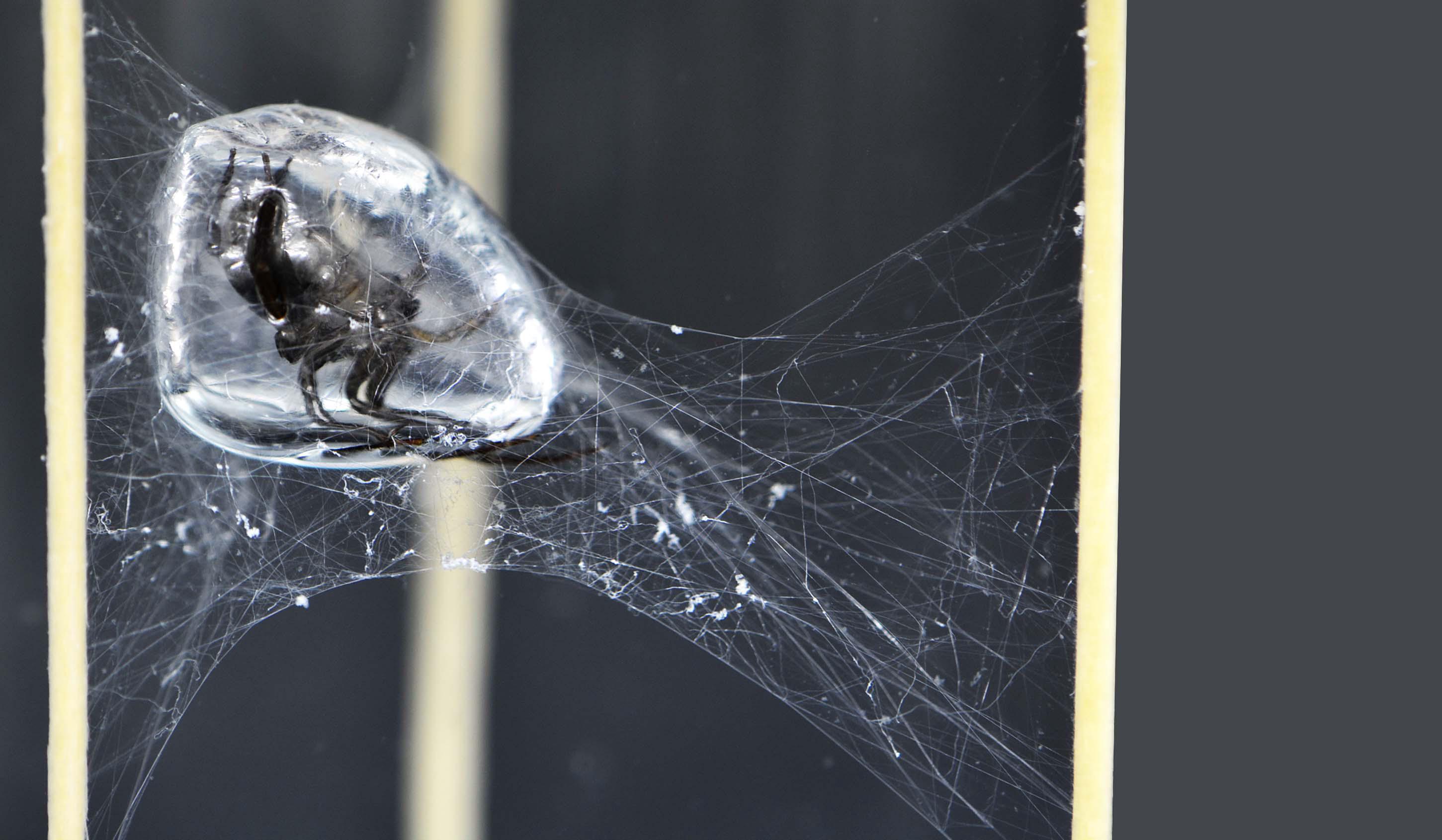
The water spider spends most of its life under water, for which it constructs a reinforced air bubble to survive. First, the spider builds a horizontal sheet web, under which the air bubble is placed. In a further step the air bubble is sequentially reinforced by laying a hierarchical arrangement of fibers from within. The result is a stable construct that can withstand mechanical stresses, such as changing water currents, to provide a safe and stable habitat for the spider. This natural production process shows how adaptive fabrication strategies can be utilized to create efficient fiber-reinforced structures.

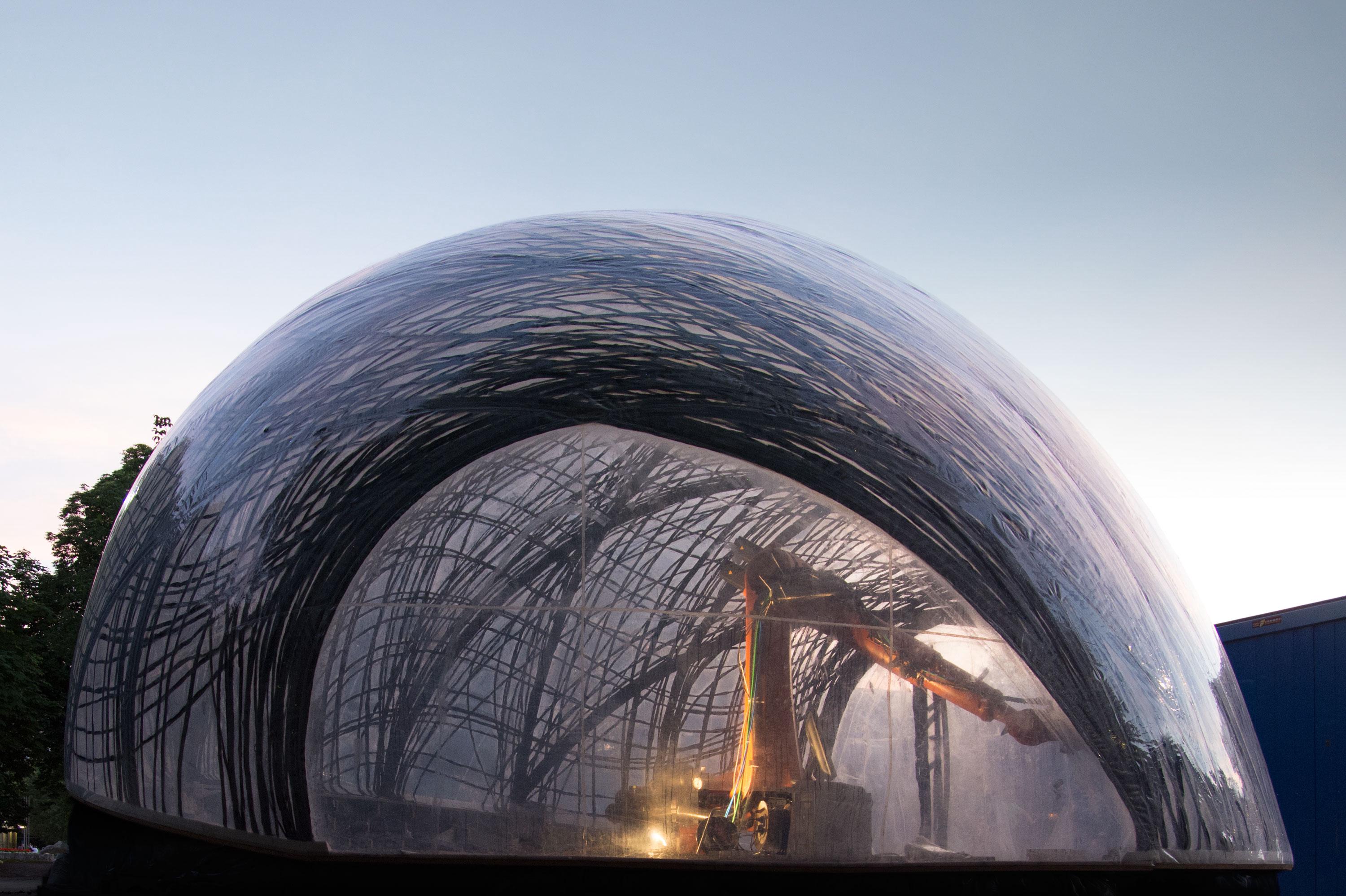
For the transfer of this biological formation sequence into a building construction application, a process was developed in which an industrial robot is placed within an air supported membrane envelope made of ETFE. This inflated soft shell is initially supported by air pressure, though, by robotically reinforcing the inside with carbon fiber, it is gradually stiffened into a self-supporting monocoque structure. The carbon fibers are only selectively applied where they are required for structural reinforcement, and the pneumatic formwork is simultaneously used as a functionally integrated building skin. This results in a resource efficient construction process.

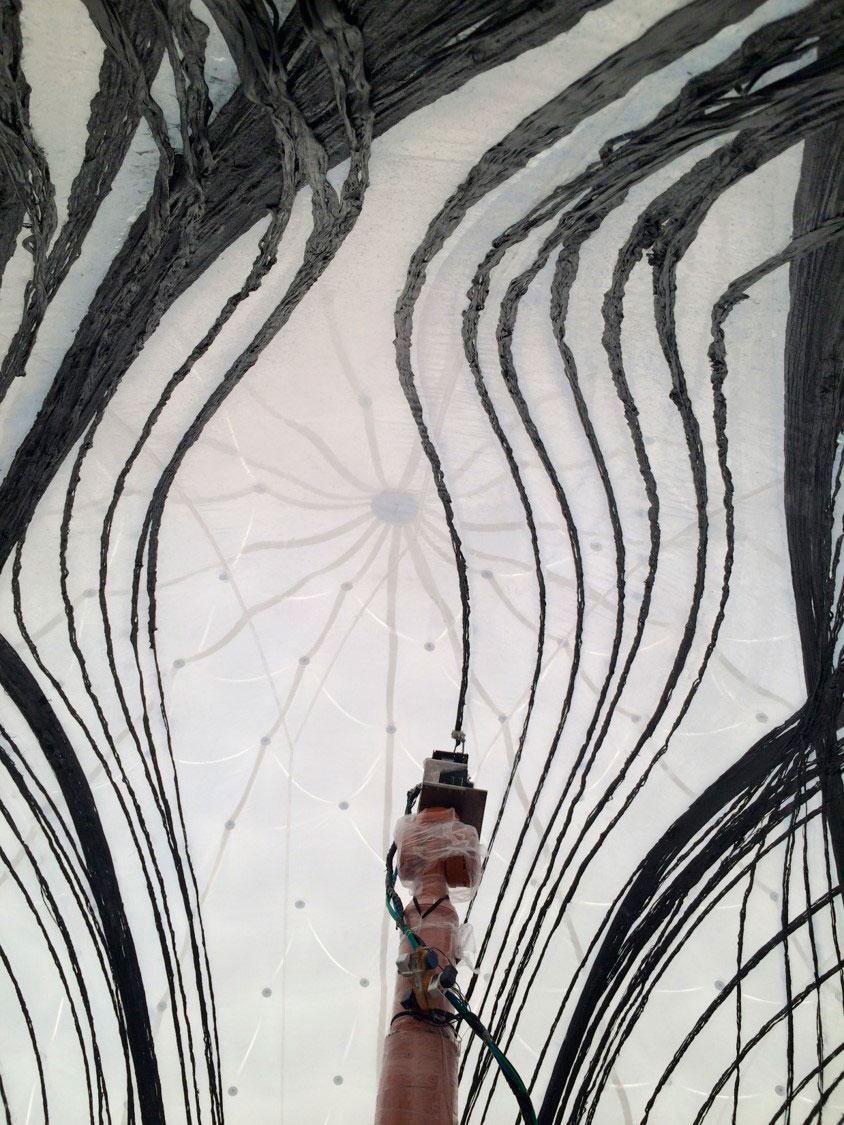
At the beginning of the design and construction process, the shell geometry and main fiber bundle locations are generated by a computational form finding method, which integrates fabrication constraints and structural simulation. In order to determine and adjust the fiber layouts a computational agent-based design method has been developed. Similar to the spider, a digital agent navigates the surface shell geometry generating a proposed robot path for the fiber placement. The agent behavior is derived from a variety of interrelated design parameters. This computational design process enables the designer to navigate and simultaneously integrate these design parameters into various performative fiber orientations and densities.

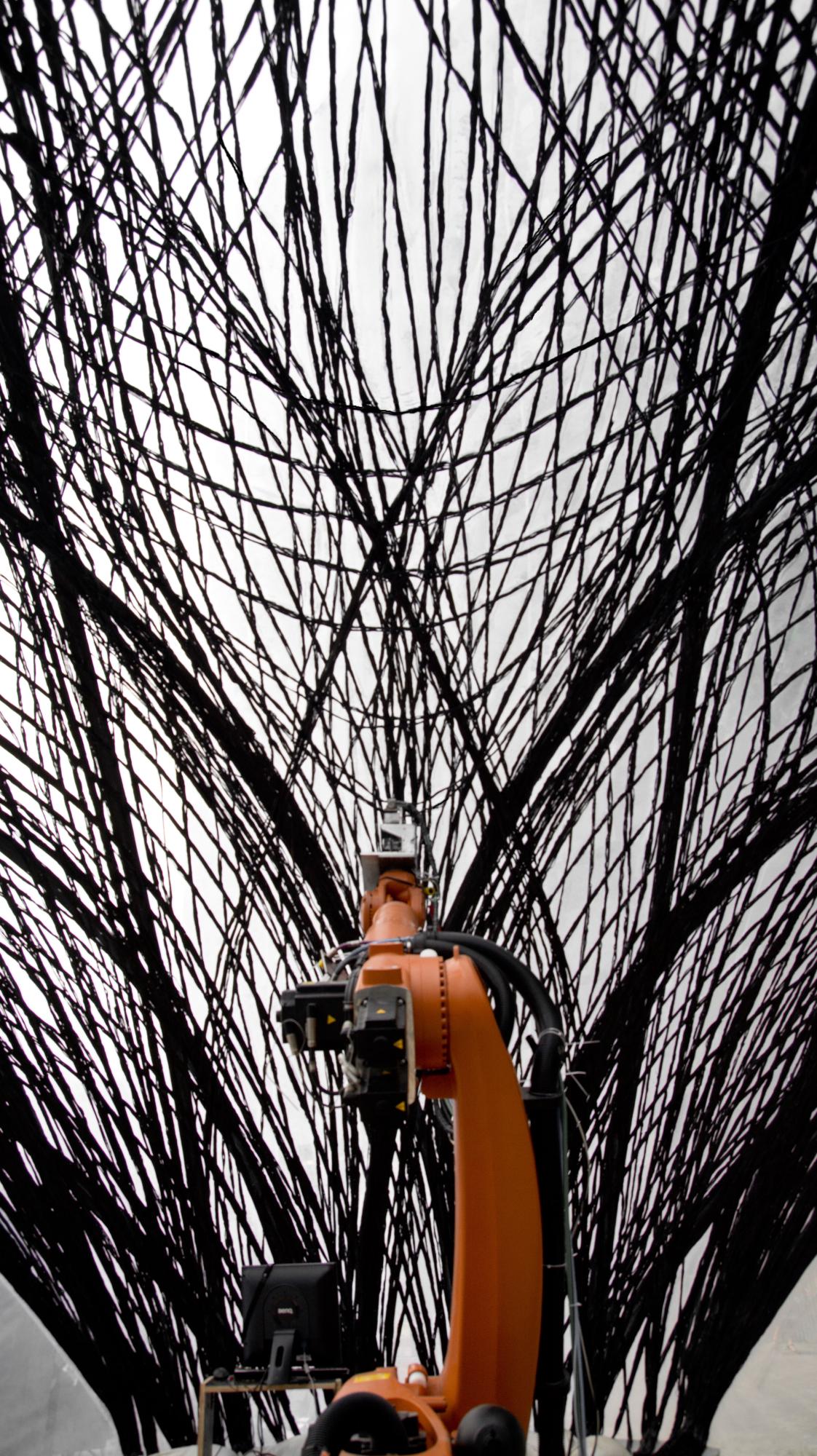
Corresponding to the adaptive computational design strategy, a prototypical robotic fabrication process was developed for carbon fiber reinforcement on the inside of a flexible membrane. The changing stiffness of the pneumatic formwork and the resulting fluctuations in deformation during the fiber placement process pose a particular challenge to the robot control. In order to adapt to these parameters during the production process the current position and contact force is recorded via an embedded sensor system and integrated into the robot control in real time. The development of such a cyber-physical system allows constant feedback between the actual production conditions and the digital generation of robot control codes. This represents not only an important development in the context of this project, but more generally provides new opportunities for adaptive robotic construction processes.

The prototypical character of the fabrication process required the development of a custom made robot tool that allows placement of carbon fibers based on integrated sensor data. The technical development of this tool became an integral part of the architectural design process. This process also posed special challenges for the material system. ETFE was identified as a suitable material for the pneumatic formwork and integrated building envelope, since it is a durable facade material and its mechanical properties minimize plastic deformation during the fiber placement. A high degree of functional integration is achieved through the use of the ETFE film as pneumatic formwork and building envelope. This saves the material consumption of conventional formwork techniques as well as an additional façade installation. A composite adhesive provided a proper bond between the ETFE film and the carbon fibers. During production nine pre-impregnated carbon fiber rovings are placed in parallel. 45km of carbon roving were laid at an average speed of 0.6 m min on 5km of robot path. This additive process not only allows stress-oriented placement of the fiber composite material, but it also minimizes the construction waste associated with typically subtractive construction processes.